Machine vision and industrial imaging systems are used in various applications ranging from automated quality control inspection, bottle filling, robot pick-and-place applications, autonomous drone or vehicle guidance, patient monitoring, agricultural irrigation controls, medical testing, metrology, and countless more applications.
Imaging systems typically include a least a camera and lens, and often also include one or more of specialized lighting, adapter cards, cables, software, optical filters, power supply, mount, or enclosure.
At 1stVision we’ve created a resource page is intended to make sure that nothing in a planned imaging application has been missed. There are many aspects on which 1stVision can provide guidance. The main components to consider are indicated below.

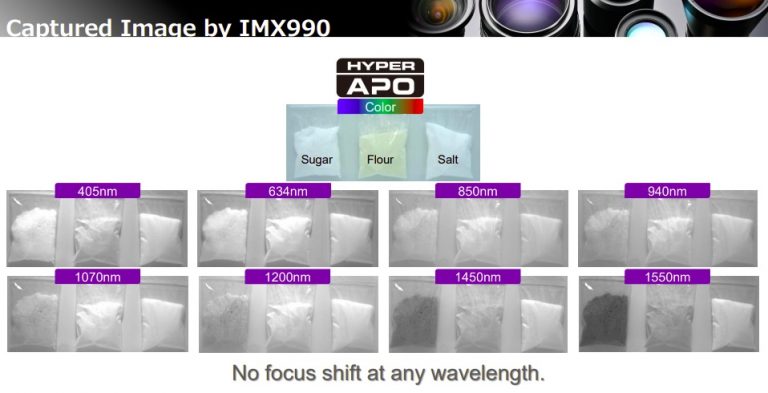
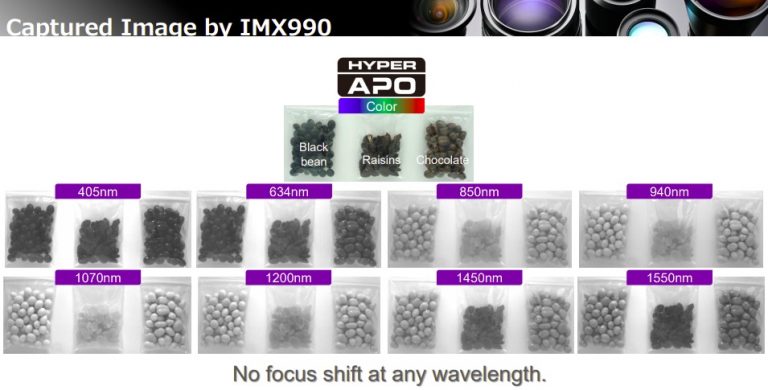
Cameras: There are area scan cameras for visible, infrared, and ultraviolet light, used for static or motion situations. There are line scan cameras, often used for high-speed continuous web inspection. Thermal imaging detects or measures heat. SWIR cameras can identify the presence or even the characteristics of liquids. The “best” camera depends on the part of the spectrum being sensed, together with considerations around motion, lighting, surface characteristics, etc.

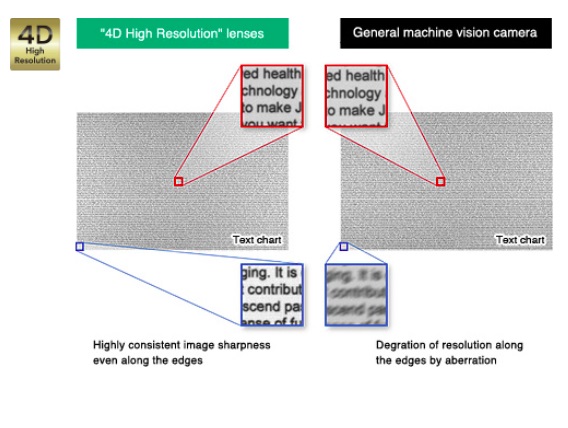
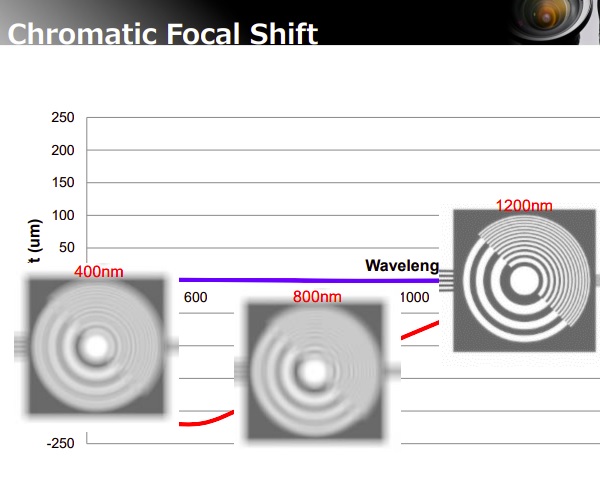
Lens: The lens focuses the light onto the sensor, mapping the targeted Field of View (FoV) from the real world onto the array of pixels. One must consider image format to pair a suitable lens to the camera. Lenses vary by the quality of their light-passing ability, how close to the target they can be – or how far from it, their weight (if on a robot arm it matters), vibration resistance, etc. See our resources on how to choose a machine vision lens. Speak with us if you’d like assistance, or use the lens selector to browse for yourself.
Lighting: While ambient light is sufficient for some applications, specialized lighting may also be needed, to achieve sufficient contrast. And it may not just be “white” light – Ultra-Violet (UV) or Infra-Red (IR) light, or other parts of the spectrum, sometimes work best to create contrast for a given application – or even to induce phosphorescence or scatter or some other helpful effect. Additional lighting components may include strobe controllers or constant current drivers to provide adequate and consistent illumination. See also Lighting Techniques for Machine Vision.
Optical filter: There are many types of filters that can enhance application performance, or that are critical for success. For example a “pass” filter only lets certain parts of the spectrum through, while a “block” filter excludes certain wavelengths. Polarizing filters reduce glare. And there are many more – for a conceptual overview see our blog on how machine filters create or enhance contrast.
Don’t forget about interface adapters like frame grabbers and host adapters; cables; power supplies; tripod mounts; software; and enclosures. See the resource page to review all components one might need for an industrial imaging system, to be sure you haven’t forgotten anything.

1st Vision’s sales engineers have over 100 years of combined experience to assist in your camera and components selection. With a large portfolio of lenses, cables, NIC card and industrial computers, we can provide a full vision solution!